【16】KMAPによる非線形制御
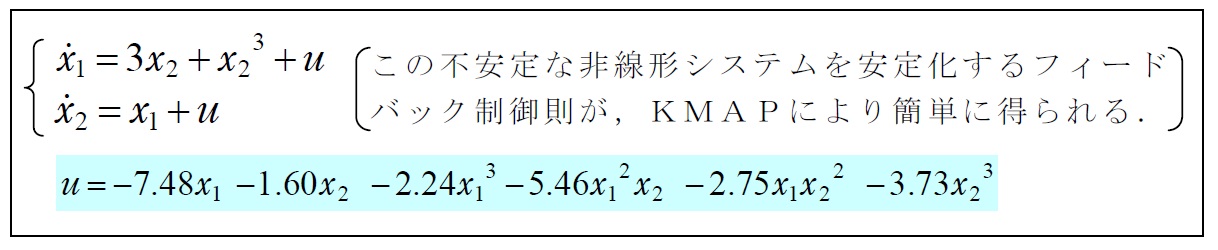
KMAPで簡単に解ける非線形最制御-非線形システムのフィードバック制御
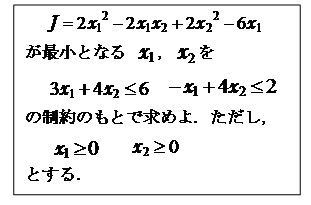
KMAPで簡単に解ける非線形最適化-変数制約のある非線形関数の最小値
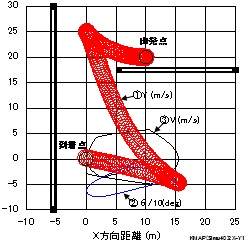
KMAPで簡単に解ける非線形最適化-飛翔体の最適航法
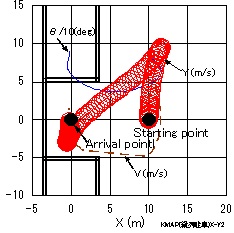
KMAPで簡単に解ける非線形最適化-2輪車両の車庫入れ問題
車の車庫入れ自動運転制御はKMAPを用いると簡単です
KMAPで簡単に解ける非線形最適化-2輪車両の縦列駐車問題
縦列駐車の自動運転制御はKMAPを用いると簡単です
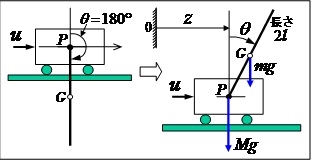
KMAPで簡単に解ける非線形最適化-倒立振子の振り上げ問題
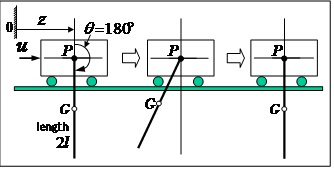
KMAPで簡単に解ける非線形最適化-倒立振子の振り上げ(アニメーション)
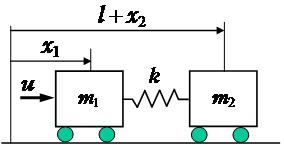
KMAPで簡単に解ける最適化-2慣性共振系の時間指定振動抑制
KMAPで簡単に解ける最適化-走行クレーンの距離を指定した振れ止め問題
KMAPで簡単に解ける最適化-走行クレーンの距離を指定した振れ止め(アニメーション)
走行クレーンの振れ止め制御はKMAPを用いると簡単です
走行クレーンの位置を指定した振れ止め制御
KMAPで簡単に解ける非線形最適化-指定した位置と時間にドローンを静止させる問題
航空機の運動解析KMAPの専用ホームページに戻る
片柳亮二博士のホームページへ
(片柳亮二)